




Top 50 Popular Supplier
15/05/2563 08:36 น. ,
อ่าน 17,002 ครั้ง
3 Phase In duction motor (Squirral cage)
โดย : Admin
เรียบเรียงโดย : สุชิน เสือช้อย (แอดมิน)
พื้นฐานมอเตอร์เหนี่ยวนำ 3 เฟส แบบกรงกระรอก
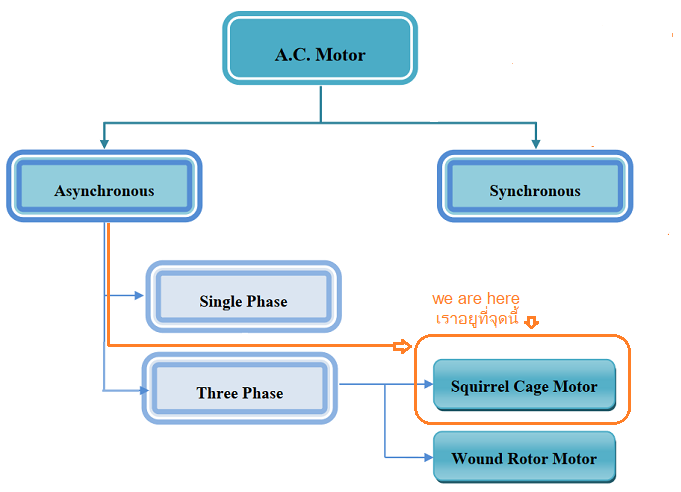
อะซิงโครนัสมอเตอร์ (Asynchronouse Motor) หรือ อินคัคชั่นมอเตอร์ (Induction Motor) หรือมอเตอร์เหนี่ยวนี้โดยทั่วไปจะมีทั้งที่เป็นแบบสามเฟสและแบบเฟสเดียว
*** ต่อไปนี้แอดมินจะขอใชัคำว่ามอเตอร์เหนี่ยวนำแทนคำว่า อะซิงโครนัส และ อินดัคชั่นมอเตอร์ ในการเขียนบทความนี้
นอกจากนั้นมอเตอร์เหนี่ยวนำแบบสามเฟสนี้ยังแบ่งประเภทได้อีกเป็นสองประเภทคือ มอเตอร์เหนี่ยวนำแบบกรงกระรอก ( Squirrel Cage Motor) และ มอเตอร์เหนี่ยวนำแบบวาวด์โรเตอร์ ( Wound Rotor Motor) หรือมอเตอร์เหนี่ยวนำแบบ สลิป-ริง (Slip-Ring Motor)
ส่วนมอเตอร์เหนี่ยวเฟสเดียวก็เช่นกัน ก็ยังมีการแบ่งแยกออกเป็นประเภทต่างๆอีกหลายประเภทซึ่งแอดมินจะได้เขียนอธิบายในตอนถัดไป...สำหรับเนื้อหาในตอนนี้จะขอเน้นเฉพาะเนื่อหาของมอเตอร์เหนี่ยวนำสามเฟสแบบกรงกระรอกก่อนเท่านั้น
โครงสร้างของมอเตอร์เหนี่ยวนำแบบกรงกระรอก
มอเตอร์เหนี่ยวนำแบบกรงกระรอกนี้จะมีโครงสร้างสองส่วนหลักๆด้วยกัน คือ ส่วนที่อยู่กับที่หรือสเตเตอร์ (Stator) และส่วนที่หมุนเคลื่อนที่หรือโรเตอร์ (Rotor)
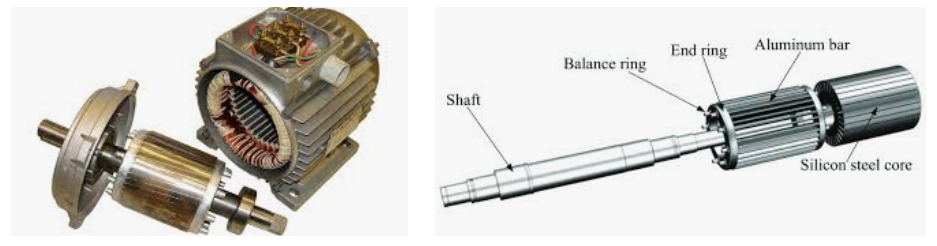
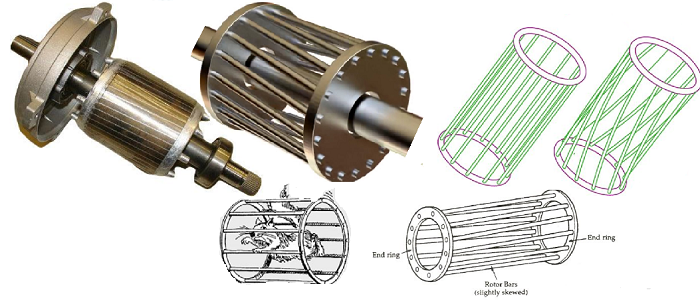
ซ้ายมือ : รูปโครงสร้างหลัก ขวามือ : รูปโรเตอร์และรายละเอียดปลีกย่อยของโรเตอร์
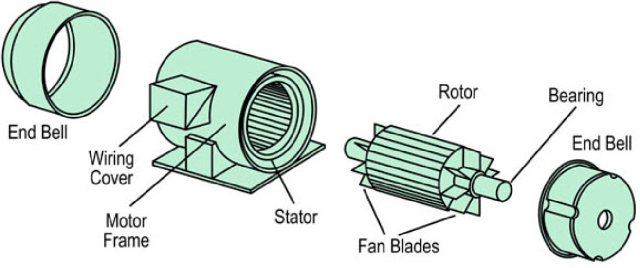
คำศัพท์ต่างๆที่ใช้เรียกโครงสร้างของมอเตอร์
โครงสร้างของสเตเตอร์
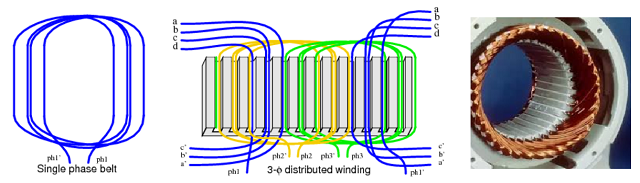
ส่วนที่อยู่กับที่ของมอเตอร์ชนิดนี้ก้จะประกอบไปด้วยขดลวด 3 ชุด ซึ่งฝั่งอยู่ในร่องสล๊อทซึ่งเป็นแกนเหล็กลามิเนต ส่วนต้นและปลายของขดลวดแต่ละขดก็จะถูกนำมาต่อเข้ากับเทอร์มินอลต่อสายที่ด้านข้างของตัวมอเตอร์ เพื่อต่อวงจรให้เหมาะสมตามลักษณะแหล่งจ่ายของแต่ละพื้นที่ที่มีการนำมอเตอร์นี้ไปใช้งาน ซึ่งจะต่อวงจรได้ทั้งแบบสตาร์และเดลต้าโดยขึ้นอยู่กับระดับแรงดันของแหล่งจ่ายกำลังไฟฟ้าที่มีใช้งานอยู่ในพื้นที่นั้นๆ
ชมคลิปอธิบายการต่อวงจรอย่างละเอียด => การต่อมอเตอร์ 3 เฟส <= คลิก
โครงสร้างของโรเตอร์
สำหรับโครงสร้างของโรเตอร์ชนิดนี้ จะประกอบไปด้แท่งอลูมิเนียม หรือ อลูมิเนียม บาร์ (aluminum bar) ฝังอยู่ในแผ่นเหล็กลามิเนต และมิการเชื่อมต่อหัวท้ายให้ติดกันซึ่งมีรูปร่างคล้ายกับกรงกระรอก ดังตัวอย่าง
การทำงานของมอเตอร์ 3 เฟสแบบกรงกระรอก
การทำงานของมอเตอร์ชนิดนี้จะอาศัยการเหนี่ยวนำเป็นกลไกสำคัญในการทำให้โรเตอร์เกิดการหมุน กล่าวคือเมื่อมีการจ่ายไฟ 3 เข้าไปยังขดลวดสเตเตอร์ ก็จะทำให้เกิดสนามแม่เหล็กรอบๆตัวนำและหมุนเคลื่อนที่เปลี่ยนแปลงตามไปเวลาแปรผันตามรูปคลื่นไซน์ (Sine Wave )ที่เป็นแหล่งจ่ายไฟ
สนามแม่เหล็กที่เกิดขึ้นนี้จะเรียกสั้นๆง่ายๆว่า "ว่าสนามแม่เหล็กหมุน" (magnetic rotating field ) ซึ่งจะหมุนด้วยความเร็วตามสมการ Ns = 120 * F / P ซึ่งโดยทั่วไปก็มักจะเรียกปรากฏการณ์นี้อีกชื่อหนึ่งว่า ความเร็วซิงโครนัส หรือ โครนัสสปีด (Synchronouse Speed)
*** F คือความถี่ของกระแสไฟฟ้า 50 หรือ 60 เฮิร์ท ส่วน P คือจำนวนข้ัวแม่เหล็กที่เกิดจากการพันขดลวดที่สเตอร์ ซึ่งมีจำนวนเป็นเลขคู่ 2,4,6,8,10 หรือ 12 ขั้ว ขึ้นที่กับการออกแบบ
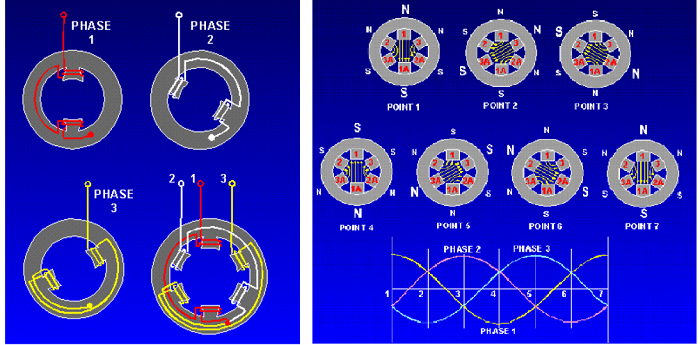
ซ้ายมือ:ตัวอย่างการพันขดลวดสเตเตอร์ของมอเตอร์ 3 เฟส แบบที่เป็นชนิด 2 ขั้วแม่เหล็ก
ขวามือ : แสดงการเกิดผลรวมของเส้นแรงแม่เหล็กหรือเส้นแรงแม่เหล็กลัพธ์ ซึ่งทำให้เกิดแกนกลางของขั้วแม่เหล็ก และทำให้มีขั้วเหนือและขั้วใต้หมุนเปลี่ยนแปลงตามเวลาแปรผันไปตามรูปคลื่นไซน์ของแรงดันไฟฟ้าที่จ่ายเข้าไปยังขดลวด (ตัวอย่างมอเตอร์ที่เป็นชนิด 2 ขั้วแม่เหล็ก)
 |
 |
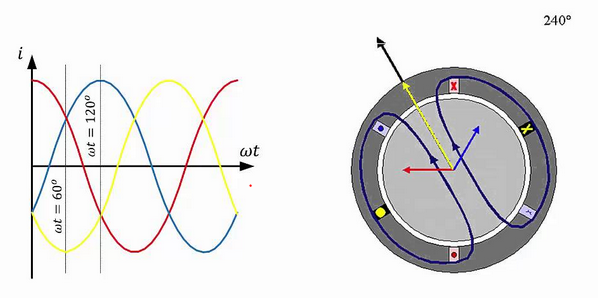
รูปแสดงการเกิดสนามแม่เหล็กหมุน โดยเวกเตอร์ สีแดง สีน้ำเงินและสีเหลือง จะเป็นตัวแสดงปริมาณสนามแม่เหล็กที่เกิดขึ้นในขดลวดสเตเตอร์แต่ละชุด ซึ่งจะมีค่ามากน้อยไม่เท่ากันในแต่ละช่วงเวลา โดยจะขึ้นอยู่กับขนาดแรงดันของแต่ละเฟสในช่วงเวลานั้น ส่วนเวคเตอร์สีดำจะแสดงผลรวมหรือเส้นแรงแม่เหลํกลัพธ์ (Resultant Flux) ที่เกิดขึ้นในแต่ละองศาการหมุน
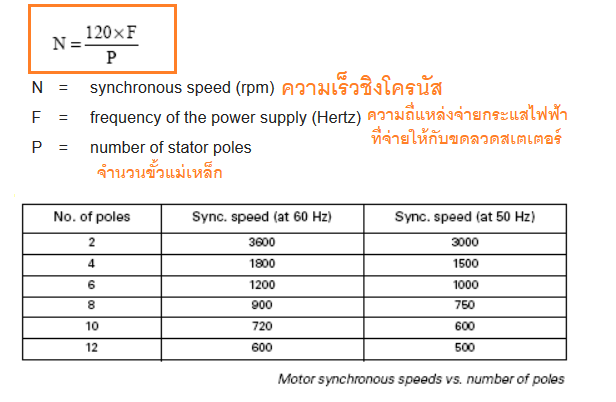
ตารางแสดง ความเร็วของมอเตอร์ของสนามแม่เหล็กหมุน หรือชิงโครนัสสปีด ที่เกิดขึ้นสเตเตอร์หลังจากที่มีการป้อนแรงดันให้กับขดลวดสเตเตอร์ โดยที่ความเร็วซิงโครนัสหรือความเร็วสนามแม่เหล็กหมุนนี้จะขึ้นอยู่กับความถี่ของแหล่งจ่ายกระแสไฟฟ้าและจำนวนการลงขดลวดที่สเตเตอร์ว่าออกแบบ ว่ามีจำนวนขั้วแม่เหล็กกี่ขั้ว
การทำงาน (ต่อ)
หลังจากป้อนไฟเข้าขดลวดสเตเตอร์แล้ว ก็จะทำให้เกิดสนามแม่เหล็กหมุนและหมุนด้วยเร็วเท่ากับความเร็วซิงโครนัสสปีดดังที่อธิบายมาแล้วด้านบน ...จากนั้นก็จะทำให้เกิดปรากฏการณ์ที่เรียกว่าสนามแม่เหล็กหมุนก็จะวิ่งตัดกับตัวนำ (แท่งอลูมิเนียมหรืออลูมิเนียมบาร์ที่ฝังอยู่ในแกนเหล็กในตัวโรเตอร์) ซึ่งก็จะให้เกิดการเหนี่ยวขึ้นในโรเตอร์
และเมื่อเกิดการเหนี่ยวขึ้นที่โรเตอร์ ก็จะทำให้เกิดกระแสไหลในตัวนำ (แท่งอลูมิเนียม) และทำให้เกิดเส้นแรงแม่เหล็กขึ้นรอบๆตัวนำ
หลังจากเมื่อเกิดเส้นแรงแม่เหล็กขึ้นรอบๆตัวนำ ซึ่งจะมีทิศทางตรงกันข้ามกับเส้นแรงแม่เหล็กเกิดจากขดลวดสเตเตอร์ และจะเกิดการผลักกันซึ่งทำให้โรเตอร์เกิดการหมุนเคลื่อนที่
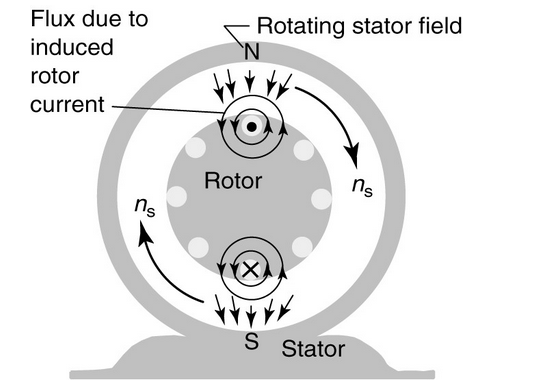
รูปแสดงปฏิกริยาที่เกิดขึ้นระหว่างเส้นแรงแม่เหล็กที่เกิดขึ้นที่สเตเตอร์ กับ เส้นแรงแม่เหล็กที่เกิดขึ้นที่โรเตอร์
|
|
|


เอกลักษณ์และคุณสมบัติ
โดยธรรมชาติของมอเตอร์ชนิดนี้จะทำงานหรือหมุนได้นั้นจะต้องอาศัยหลักการเหนี่ยว ซึ่งอาศัยความเร็วที่แตกต่างกันระหว่างความเร็วของโรเตอร์ กับความเร็วสนามแม่เหล็กหมุนที่คำนวนได้จากสมการ Ns = 120 *F / P
โดยทั้วไปความเร็วของโรเตอร์จะมีค่าน้อยกว่าความเร็วสนามแม่เหล็กหมุน ซึ่งโดยทั่วไปจะแตกต่างกันอยู่ 3-5 % ซึ่งตามทฤษฏีจะเรียกความเร็วที่แตกต่างกันนี้ว่าความเร็วสลิปหรือความเร็วลื่นไถล ซึ่งสามารถคำนวนได้จากสมการดังนี้ (ค่าสลิปจะคิดเป็นเปอร์เซ็นต์)
ความเร็วสลิป Slip (%S) = [ (Ns - Nr / Ns) * 100 %]
Ns ความเร็วซิงโครนัส หรือความเร็วสนามแม่เหล็กหมุน Ns = (120 *F/P)
Nr ความเร็วของโรเตอร์ (ความเร็วที่ระบุบนแผ่นป้ายมอเตอร์ หรือ Name Plate)
.png)
รูปแสดง คุณสมบัติด้านความเร็วกับแรงบิด
ข้อดีและข้อด้อย
มอเตอร์เหนี่ยวนำแบบกรงกระรอกนี้ ปัจจุบันเป็นที่นิยมอย่างแพร่หลายในอุตสาหกรรม เนื่องจากว่ามีโครงสร้างที่ง่ายไม่ซับซ้อน ขนาดกระทัดและน้ำหนักเบา การบำรุงรักษาน้อย และประสิทธิภาพสูงกว่า เมื่อเปรียบเทียบกับมอเตอร์ไฟฟ้ากระแสตรงหรือดีซีมอเตอร์ซึ่งเป็นเจนเนอเรชั่นแรกๆ นอกจากนั้นยังหาซื้อได้ง่ายเนื่องจากปัจจุบันเป็นที่นิยมหาซื้อได้ง่าย
สำหรับจำกัดที่ชัดเจน ก็คือความเร็วไม่คงที่ เนื่องจากมีสลิป และการควบคุมความเร็วทำได้ยากกว่าหากเปรียบเทียบกับมอเตอร์ดีซี ซึ่งต้องใช้เทคโนโลยีที่ยุ่งยากและซับซ้อนกว่า (เขียนตามทฤษฏีเก่าๆ)
แต่อย่างไรก็ตามกาลเวลาได้เปลี่ยนไป ปัจจุบันการควบคุมมอเตอร์ชนิดนี้ไม่ว่าจะเป็นการสตาร์ทหรือการควบคุมความเร็วของมอเตอร์มิใช่เป็นเรื่องยากอีกต่อไป ซึ่งเทคโนโลยีที่ใช้ควบคุมมอเตอร์ชนิดนี้ได้มีจำหน่ายอย่างแพร่หลายในตลาดอุตสาหกรรม
ปัจจุบันมอเตอร์ชนิดนี้ถือว่ามีการใช้งานมากที่สุดในอุตสาหกรรม เนื่องจากเป็นชนิดที่ตอบโจทย์อุตสาหกรรมได้มากที่สุด
คลิปอื่นที่เกี่ยวข้อง ซึ่งมีอยู่ในเพลลิสช่องยูทูปของ 9engineer.com โดยใช้ชื่อช่องว่า Technology talk Channel
1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
2. วงจรควรคุมการกลับทางหมุน
3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
6. การเช็ตโอเวอร์โหลดรีเลย์
7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
9.อื่นๆ
========================================================
 |
||
- ================= ยูทุปของ 9engineer ,com ===================
- คลิปที่น่าสนใจจัดทำโดย 9engineer.com ภายใต้ชื่อช่องTechnology talk Channel
- 1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
- 2. วงจรควรคุมการกลับทางหมุน
- 3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
- 4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
- 5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
- 6. การเช็ตโอเวอร์โหลดรีเลย์
- 7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
- 8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
- 9.อื่นๆ
- **** นายเอ็นจิเนียร์ขอสงวนสิทธิ์รับรองความถูกต้อง โปรดใช้วิจารณญาณในการรับข่าวสารข้อมูล