




เรียบเรียงโดย: สุชิน เสือช้อย (แอดมิน)
" Separately Excited DC Motor"
พื้นฐานระบบขับเคลื่อนทางไฟฟ้าที่สำคัญ แต่มีผู้ที่เกี่ยวข้องจำนวนไม่น้อยยังขาดความเข้าใจ
.
|
||||||||||||||||||||
Separately Excited กับ Self – excited ต่างอย่างไร?
|
||||||||||||||||||||

 |
 |
||
|
|
|||
|
|
|||
จากสมการความเร็วเชิงมุม จะพบว่าการควบคุมความเร็วของดีซีมอเตอร์ทำได้ 2 วิธีดังนี้
1.ควบคุมแรงดันอาร์เมเจอร์
|
Vt - Ia Ra |
Ea |
การควบคุมแรงดันอาร์เมเจอร์ทำได้โดยการกควบคุมแรงดัน ที่จ่ายให้ขดลวดอาร์เมเจอร์ |
2.ควบคุมเส้นแรงแม่เหล็ก
|
Ka Ø
|
Ø |
การควบคุมเส้นแรงแม่เหล็กจะควบคุมกระแสฟิลด์ ที่จ่ายให้กับขดลวดฟิลด์ โดยใช้วงจร Control Rectifier หรือ field regulator |
*** เพื่อให้ง่ายต่อการพิจารณาเราสามารถแยกสมการออกเป็น 2 ส่วนคือสมการส่วนที่เป็นตัวตั้ง (Vt - Ia Ra) ตัวแปรทั้งหมดจะเกี่ยวข้องและอยู่กับวงจรอาร์เมเจอร์ และส่วนที่เป็นตัวหาร ( Ka ø, ตัวแปรหลักคือ ø ซึ่งจะเกี่ยวข้องกับวงจรฟิลด์ ) |
|||
ควบคุมความเร็วโดยใช้แบบ Self– excitedได้หรือไม่และทำไม่ต้องใช้แบบ Separately Excited ?
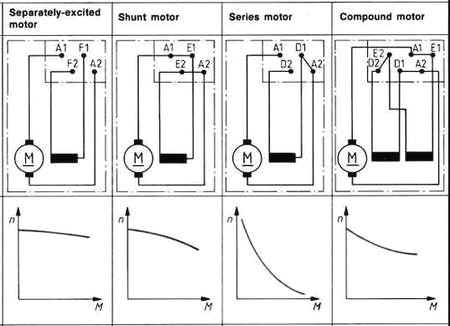
จากสมการความเร็วดังที่กล่าวมาจะพบว่าหากนำมอเตอร์แบบขนานซึ่งเป็นแบบ Self – excited มาใช้ในงานควบคุมความเร็วในกระบวนการผลิดด้วยวิธีการควบคุมแรงดันอาร์เมเจอร์โดยการเพิ่มหรือลดแรงดัน เพื่อควบคุมความเร็วให้เปลียนแปลงตามกระบวนการผลิตที่ต้องการ เราจะพบว่าทุกๆครั้งที่มีการเปลี่ยนแปลงแรงดัน จะทำให้เกิดการเปลี่ยนแปลงค่าต่างๆทั้งในวงจรวงจรฟิลด์ และวงจรอาร์เมเจอร์ โดยเฉพาะสนานแม่เหล็กในวงจรฟิลด์จะมีค่าไม่คงที่ ทำให้การควบคุมความเร็วของมอเตอร์ทำได้ยาก ( เนื่องจากความต้านทานขดลวดฟิลด์มีค่าคงที่ เมื่อมีการเปลี่ยนแปลงแรงดัน จะทำให้กระแสฟิลด์และสนามแม่เหล็กเปลี่ยนแปลงตาม )
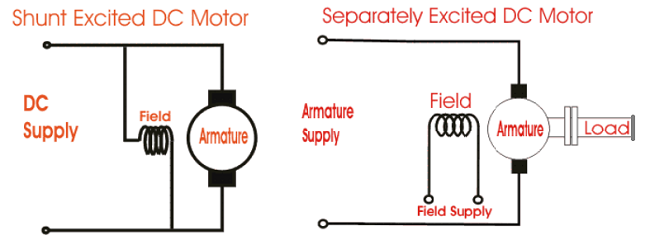
จากกรณีดังกล่าวจึงทำให้ดีซีมอเตอร์แบบ Self – excited ไม่เป็นที่นิยมในการใช้ควบคุมความเร็วในงานอุตสาหกรรม โดยเฉพาะโหลดที่ต้องการแรงบิดคงที่ตลอดย่านความเร็ว ซึ่งในทางปฏิบัติจะใช้วิธีการควบคุมแบบกระตุ้นแยก (วงจรฟิลด์และวงจรอาร์เมเจอร์จะใช้แหล่งจ่ายคนละชุดกัน และแยกเป็นอิสระซึ่งกันและกัน โดยใช้แหล่งจ่าย Vf จ่ายให้วงจรฟิลด์ และแหล่งจ่าย Vt จ่ายให้วงจรอาร์เมจอร์ ) ซึ่งจะทำให้การควบคุมทำได้ง่ายขึ้น กล่าวคือการควบคุมความเร็วสามารถแยกการควบคุมในแต่ละวงจรได้โดยอิสระ เช่นหากต้องการควบคุมสนามแม่เหล็กที่วงจรฟิลด์ (กรณีต้องการความเร็วสูงๆที่เกินจากความเร็วพิกัดที่บอกบนแผ่นป้าย) ก็ทำได้โดยลดแรงแรงดัน Vf และคงที่แหล่งจ่าย Vt ที่ต่อกับวงจรอาร์เมเจอร์ให้อยู่ระดับแรงดันพิกัด หรือในทางกลับกัน หากต้องการควบคุมความเร็วในย่านที่ต่ำกว่าความเร็วพิกัด ก็สามารถควบคุมแรงดันที่ Vt ได้โดยตรง และคงที่แรงดันพิกัดVf ที่วงจรฟิลด์เป็นต้น
Armature Voltage Control กับ Flux Control ใช้งานแตกต่างกันอย่างไร?
การควบคุมแรงดันอาร์เมเจอร์จะใช้ควบคุมความเร็วรอบมอเตอร์ ในกรณีที่ต้องการความเร็วรอบตั้งแต่มากกว่าศูนย์ขึ้นไปจนกระทั่งถึงความเร็วพิกัด (Rated Speed) หรือ" base speed" ลักษณะความเร็วรอบจะเปลี่ยนแปลงขึ้น-ลง ตามระดับแรงดันอาร์เมเจอร์ ส่วนสมรรถนะการทำงานในโหมดนี้ จะทำให้มอเตอร์สามารถสร้างทอร์คขับเคลื่อนโหลดได้ตามพิกัด (Rated Torque) ตลอดย่านความความเร็ว โดยกระแสอาร์เมเจอร์ Ia จะขึ้นอยู่กับโหลด และกำลังทางกลหรือกำลังด้านขาออกจะเพิ่มขึ้นตามความเร็วที่เพิ่มขึ้น ดังรูป การใช้งานในย่านนี้จะเหมาะสมสำหรับขับเคลื่อนโหลดประเภทที่ต้องการทอร์คหรือแรงบิดคงที่ (constant Torque)
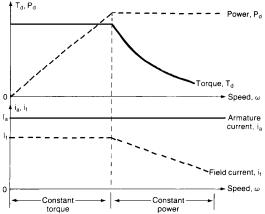
ส่วนการควบคุมเส้นแรงแม่เหล็ก (Flux Control หรือ Field control) ทำได้โดยการลดแรงดันที่จ่ายให้กับขดลวดฟิลด์ ซึ่งส่งผลทำให้จำนวนเส้นแรงแม่เหล็กลดลงตามกระแสฟิลด์ (สนามแม่เหล็กจะอ่อนตัวลง ,Field weakening ) และทำให้ความเร็วรอบมอเตอร์จะเพิ่มขึ้น การใช้งานในโหมดนี้โดยทั่วไปจะใช้กับโหลดที่ต้องการความเร็วสูงกว่า base speed และต้องการแรงบิดลดลงเมื่อความเร็วรอบสูงขึ้น เช่นเครื่องม้วนวัสดุ ม้วนฟิล์ม และแมชชีนทูลต่างๆ เป็นต้น
การควบคุมการทำงานในโหมดนี้จะไม่เหมาะสมกับโหลดประเภทที่ต้องการแรงบิดคงที่ เนื่องจากโดยทั่วไปกำลังด้านเอาท์พุตของมอเตอร์แต่ละตัวมีค่าคงที่ดังสมการ Po/p = T * Wm (หากขับโหลดด้วยแรงบิดตามพิกัดและหมุนด้วยความเร็วตามพิกัดบนแผ่นป้ายมอเตอร์จะจ่ายกำลังด้านเอาท์พุตทามพิกัด) ดังนั้นหากนำไปใช้ขับโหลดที่แรงบิดคงที่ด้วยความเร็วที่สูงกว่าพิกัดบนแผ่นป้าย จะส่งผลทำให้มอเตอร์ต้องจ่ายกำลังด้านเอาท์พุตสูงกว่าพิกัด และเป็นอัตครายต่อมอเตอร์
(ดูคุณสมบัติของโหลดแต่ละประเภท...คลิก)
แนวโน้มระบบขับเคลื่อนทางดีซีเป็นอย่างไร ?
ในหลายปีที่ผ่านมาระบบขับเคลื่อนทางดีซีได้ลดจำนวนการใช้งานลงอย่างมากเมื่อ เปรียบเทียบกับระบบเอซี (บางบริษัทที่เคยผลิตระบบขับเคลื่อนดีซีขายก็ดำเนินการต่อไม่ได้ ต้องปรับเปลี่ยนตัวเองหรือยกเลิกการผลิต ส่วนผู้ผลิตรายใหม่ก็ไม่มีใครคิดที่จะพัฒนาระบบนี้ขึ้นมาทำตลาด) เนื่องจาก แนวโน้มและทิศทางของผู้ใช้เทคโนโลยีได้เปลี่ยนแปลงไป เทคโนโลยีการขับเคลื่อนทางเอซี(AC Drives) ได้พัฒนาก้าวหน้าไปอย่างมากจนสามารถใช้งานทดแทนระบบขับเคลื่อนทางดีซีได้ เป็นอย่างดี อีกทั้งยังช่วยประหยัดค่าใช้จ่ายในการบำรุงรักษา จึงทำให้ผู้ที่พัฒนาและออกแบบเครื่องจักรส่วนใหญ่เปลี่ยนแปลงหันมานิยมใช้ AC Drives แทน
จำเป็นที่จะต้องศึกษาเกี่ยวกับการควบคุมดีซีหรือไม่?
ถึงแม้ว่าปัจจุบัน เทคโนโลยีด้านเอซีไดร์ฟ จะพัฒนาไปถึงระดับการควบคุมแบบเวกเตอร์โดยไม่ใช้เซ็นเซอร์แล้วก็ตาม (sensorless vector control) แต่โดยพื้นฐานการควบคุมนั้นก็ยังพัฒนาเพื่อเลียนแบบการทำงานระบบขับเคลื่อน ทางดีซี ระบบขับเคลื่อนดีซีนั้นถือได้ว่าเป็นต้นแบบของการขับเคลื่อนทางไฟฟ้า ดังนั้นไม่ว่าเทคโนโลยีจะเปลี่ยนแปลงไปอย่างไรก็ตาม ระบบขับเคลื่อนทางดีซียังถือว่าเป็นพื้นฐานที่สำคัญที่จะต้องเรียนรู้และทำ ความเข้าใจก่อนที่จะก้าวไปสู่การเรียนรู้ในระบบอื่นๆ ในลำดับถัดไป
========================================================
 |
||
- ================= ยูทุปของ 9engineer ,com ===================
- คลิปที่น่าสนใจจัดทำโดย 9engineer.com ภายใต้ชื่อช่องTechnology talk Channel
- 1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
- 2. วงจรควรคุมการกลับทางหมุน
- 3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
- 4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
- 5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
- 6. การเช็ตโอเวอร์โหลดรีเลย์
- 7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
- 8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
- 9.อื่นๆ
- **** นายเอ็นจิเนียร์ขอสงวนสิทธิ์รับรองความถูกต้อง โปรดใช้วิจารณญาณในการรับข่าวสารข้อมูล