




สนับสนุนเนื้อหา : บริษัท เพาเวอร์ ควอลิตี้ ทีม จำกัด
http://www.pq-team.com

ปัญหาการสตาร์ทมอเตอร์
ในการใช้งานมอเตอร์ขนาดใหญ่ที่มีพิกัดกำลังงานสูงไม่ว่าจะเป็นมอเตอร์แรงดัน ต่ำหรือแรงดันปานกลางนั้น ขณะที่เริ่มสตาร์ทมอเตอร์นั้นเป็นที่ทราบกันดีว่าจะเกิดกระแสสูงกว่ากระแส ที่พิกัดทำงานปกติ 6-8 เท่า ซึ่งกระแสที่สูงมากขณะมอเตอร์สตาร์ทนี้จะสร้างปัญหาหลายประการให้กับระบบ ไฟฟ้า เช่นทำให้อุปกรณ์ป้องกันกระแสเกินทำงาน เกิดแรงดันตกที่ขั้วของมอเตอร์และจุดต่อร่วมระบบไฟฟ้าจนสร้างผลกระทบและความ เสียหายต่ออุปกรณ์อื่นในระบบไฟฟ้า ดังนั้นเพื่อป้องกันปัญหาและความเสียหายที่จะเกิดขึ้นจึงจำเป็นที่จะต้องมี การควบคุมกระแสขณะสตาร์ทของมอเตอร์ไม่ให้สูงเกิน วิธีพื้นฐานที่ใช้กันโดยทั่วไปได้แก่การสตาร์ทแบบสตาร์-เดลต้า ถัดมาก็ได้แก่อุปกรณ์ Soft-Starter ที่อาศัยการทำงานของไทริสเตอร์เพื่อควบคุมการจ่ายแรงดัน-กระแสให้แก่มอเตอร์ และเทคนิคสุดท้ายที่มีการประยุกต์ใช้งานได้แก่การนำอินเวอเตอร์ควบคุมความ เร็วรอบมอเตอร์ (VFD/VSD) มาประยุกต์ใช้ ตารางที่ 1 แสดงการเปรียบเทียบเทคนิคการลดกระแสทั้ง 3 แบบที่มีการใช้งานกันอยู่ในปัจจุบันซึ่งทั้งหมดที่กล่าวมามีการติดตั้งแบบ อนุกรมและควรจะมีบัสบายพาสสำหรับเทคนิค Soft-Start และ VFD/VSD ในกรณีที่มีปัญหาหรือต้องการลดกำลังงานสูญเสียที่เกิดขึ้นให้น้อยที่สุด

สาเหตุของกระแสสูงขณะมอเตอร์สตาร์ท
ขณะที่มอเตอร์ต้องเริ่มหมุนจากจุดหยุดนิ่งนั้น แน่นอนว่ากำลังทางกลหรือแรงบิดที่ใช้นั้นจะต้องใช้มากกว่าที่ความเร็วรอบทำ งานปกติอย่างแน่นอนและเป็นผลให้กำลังงานไฟฟ้าที่เปลี่ยนเป็นพลังงานกลนั้นก็ ต้องการมากกว่าตอนรอบปกติ แต่จริงหรือที่กระแสที่ต้องใช้ตอนสตาร์ทนั้นจำเป็นต้องสูงถึง 6-8 เท่าของพิกัดปกติ คำตอบก็คือกระแสที่สูง 6-8 เท่านี้ไม่ได้เป็นกระแสที่ทำให้เกิดกำลังงานจริงทั้งหมดส่วนใหญ่เป็นกระแส ที่ทำให้เกิดกำลังงานรีแอคทีฟเป็นส่วนใหญ่ ดังแสดงในรูปที่ 1 หรืออาจกล่าวได้ว่าขณะสตาร์ทมอเตอร์จะมีค่าตัวประกอบกำลัง (PF) ต่ำมาก จึงทำให้มีกระแสไหลเป็นจำนวนมากขณะที่มอเตอร์ออกสตาร์ทและเมื่อมอแตอร์เริ่ม หมุนค่า PF ก็จะค่อยๆเพิ่มขึ้นจนกระทั่งถึงที่ความเร็วรอบพิกัดค่ากระแสและ PF ก็จะมีค่าใกล้เคียงกับที่ระบุไว้ของมอเตอร์ตัวนั้นๆ
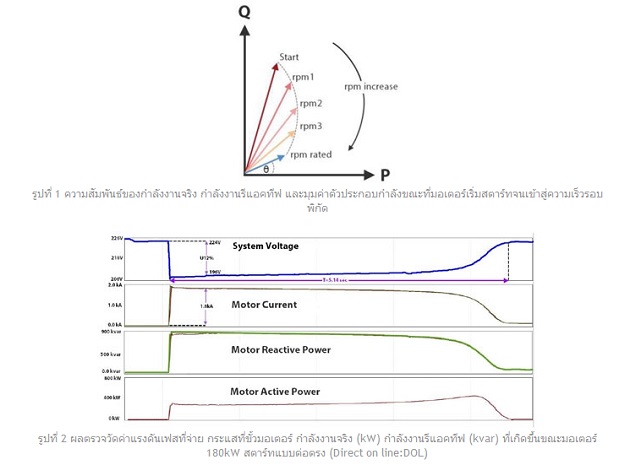
รูปที่ 2 แสดงแรงดันตกขณะที่มีการสตาร์ทมอเตอร์แรงดันต่ำ พิกัด 180kW โดยกระแสที่ไหลเข้าสู่มอเตอร์ทำให้เกิดกำลังงานจริง (kW) และกำลังงานรีแอคทีฟ (kvar) ดังนั้นจากรูปที่ 1 และ 2 ทำให้สามารถอธิบายได้ว่าถ้าเราสามารถกำจัดหรือชดเชยกำลังงานรีแอคทีฟ (kvar) ได้ทันตามความต้องการที่เกิดขึ้นก็จะสามารถลดกระแสที่มอเตอร์ใช้ในการสตาร์ท ได้นั่นเอง
ปัญหาแรงดันตกขณะมอเตอร์สตาร์ท

รูปที่ 3 วงจรสมมูลย์แสดงการจ่ายกำลังงานให้กับมอเตอร์และอิมพีแดนซ์ที่เกิดขึ้นกับระบบไฟฟ้า
รูปที่ 3 แสดงวงจรสมมูลย์ของการจ่ายกำลังไฟฟ้าให้กับมอเตอร์โดยปัญหาแรงดันตกที่เกิด ขึ้นเกิดจากกระแสที่ไหลปริมาณมากขณะที่มอเตอร์สตาร์ทจะทำให้เกิดแรงดันตก คร่อมความต้านทานและความเหนี่ยวนำของหม้อแปลงและสายตัวนำที่จ่ายกระแสไปยัง มอเตอร์ โดยถ้าเราลดกระแสที่ไหลลงได้ก็จะทำให้ระดับปัญหาของแรงดันตกที่เกิดขึ้นน้อย ลงนั่นเอง
แรงบิดขณะสตาร์ท
ในการสตาร์ทมอเตอร์สำหรับงานที่ต้องการแรงบิดขณะสตาร์ทสูงเช่นการผลิตยาง ปั๊มน้ำขนาดใหญ่ และอีกหลายอุตสาหกรรมนั้น การลดกระแสสตาร์ทของมอเตอร์โดยการใช้เทคนิค Soft-Start หรือเทคนิคการลดแรงดันที่จ่ายให้มอเตอร์นั้นไม่สามารถใช้งานได้เนื่องจากขณะ ที่เราลดแรงดันเพื่อลดกระแสสตาร์ทนั้นแรงบิดที่เกิดขึ้นก็จะลดลงไปด้วยจึงทำ ให้มอเตอร์ไม่สามารถเริ่มหมุนได้หรือต้องใช้เวลานานกว่าที่จะทำความเร็วเข้า สู่ความเร็วรอบที่พิกัดได้อีกทั้งยังเป็นอันตรายต่อตัวมอเตอร์และอุปกรณ์ Soft-Start เองด้วย เนื่องจากการใช้เวลาในการสตาร์ทนานกระแสสูงที่เกิดขึ้นเป็นเวลานานจะสร้าง ความร้อนที่สูงจนอาจเป็นอันตรายได้ นอกจากนั้นกระแสเกินหรือกระแสโอเวอร์โหลดที่เกิดขึ้นนานเกินไปอาจเป็นสาเหตุ ให้อุปกรณ์ป้องกันที่มีอยู่ในระบบทำงานได้จากรูปที่ 4 จะเห็นได้ว่าแรงบิดขณะสตาร์ทสูงสุดจะได้จากการสตาร์ทแบบต่อตรง (DOL) ซึ่งแน่นอนกระแสที่เกิดขึ้นก็จะมีค่าสูงด้วย
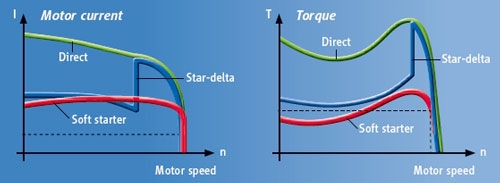
รูปที่ 4 กราฟเปรียบเทียบกระแสสตาร์ทและแรงบิดที่ได้จากเทคนิคต่างๆ
ปัญหาฮาร์มอนิกจากอุปกรณ์สตาร์ทมอเตอร์
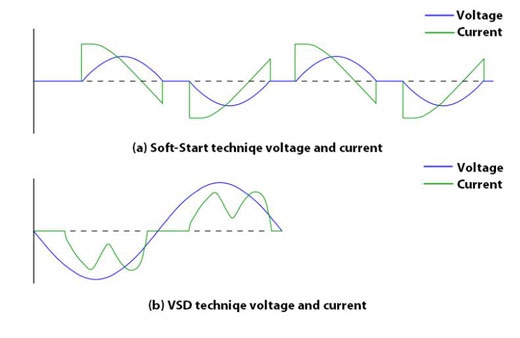
รูปที่ 5 รูปคลื่นแรงดันและกระแสที่เกิดขึ้นจากการทำงานของ (a) Soft-Start และ (b) VSD
รูปที่ 5 แสดงรูปคลื่นของกระแสและแรงดันที่เกิดขึ้นจากการทำงานของ Soft-Start และ VSD จะเห็นได้ว่ากระแสที่เกิดขึ้นจากการทำงานของทั้ง 2 อุปกรณ์ต่างก็สร้างปัญหากระแสฮาร์มอนิกให้เกิดขึ้นในระบบไฟฟ้าที่ติดตั้ง อยู่ อย่างไรก็ตามแม้ว่าทั้งคู่อาจจะถูกใช้งานในช่วงระยะเวลาสั้นๆก่อนที่จะถูก บายพาส มันก็อาจจะมากพอที่จะทำให้เกิดปัญหาเรโซแนนซ์ในระบบไฟฟ้าได้ซึ่งถ้าความถี่ ของกระแสฮาร์มอนิกที่เกิดขึ้นนี้ตรงกับความถี่เรโซแนนซ์ของระบบพอดี
========================================================
 |
||
- ================= ยูทุปของ 9engineer ,com ===================
- คลิปที่น่าสนใจจัดทำโดย 9engineer.com ภายใต้ชื่อช่องTechnology talk Channel
- 1. วงจรและวิธีการสตาร์ทแบบไดเร็คออนไลน์ DOL
- 2. วงจรควรคุมการกลับทางหมุน
- 3. วงจรและวิธีการสตาร์ทแบบสตาร์ เดลต้า Y-D Starter
- 4. การสตาร์แบบออโตทรานส์ฟอร์เมอร์ Auto transformer starter
- 5. การต่อขดลวดมอเตอร์ อย่างไรไม่ให้เกิดการใหม้หรือเสียหาย
- 6. การเช็ตโอเวอร์โหลดรีเลย์
- 7.การเช็ตโอเวอร์โหลดรีเลย์กับมอเตอร์ที่มีเซอร์วิสแฟคเตอร์
- 8.รีเลย์กับคนแทคเตอร์ต่างกันอย่างไร
- 9.อื่นๆ
- **** นายเอ็นจิเนียร์ขอสงวนสิทธิ์รับรองความถูกต้อง โปรดใช้วิจารณญาณในการรับข่าวสารข้อมูล