โดย : สุชิน เสือช้อย
webmaster(at)9engineer.com
เซอร์โวมอเตอร์คืออะไร มีดีอย่างไร ทำไมต้องใช้เซอร์โว
คำว่า"เซอร์โวมอเตอร์" อาจจะเป็นคำศัพท์ที่ไม่ค่อยเป็นที่คุ้นเคยกันสักเท่าไหร่สำหรับบางท่าน แต่บางท่านอาจจะคุ้นหูบ้างและจำคำว่า"เซอร์โวมอเตอร์"ได้อย่างฝังใจเมื่อได้รับใบเสนอราคาจากผู้ขาย (เนื่องจากในอดีตระบบเซอร์โวนี้จะมีราคาที่ค่อนข้างสูงมากเมื่อเปรียบเทียบระบบขับเคลื่อนทางไฟฟ้าอื่นๆ)
ช่วงที่ผ่านมาการใช้งานระบบเซอร์โวจะจำกัดอยู่ในกลุ่มของเครื่องจักรบางประเภทเท่านั้น แต่ปัจจุบันซึ่งเป็นยุคของความเร็ว(speed) ซึ่งเป็นยุคที่ต้องแข่งขันกันด้วยความเร็วที่นอกเหนือจากคุณภาพและราคาซึ่งเป็นปัจจัยพื้นฐานของการผลิตสินค้าและการแข่งขันแบบเดิมๆ ทำให้อุตสาหกรรมยุคใหม่ไม่สามารถหลีกเลี่ยงการพึ่งพาเทคโนโลยีที่มีการตอบสนองต่อเวลาที่รวดเร็ว ถูกต้องแม่นยำและมีความน่าเชื่อถือสูงเป็นเครื่องมือประกอบการผลิตและการทำธุรกิจ
ความต้องการดังกล่าวทำให้ชื่อของเซอร์โวมอเตอร์ได้รับการกล่าวขานมากขึ้น ส่วนราคาก็ลดลงตามปริมาณการใช้งานที่เพิ่มขึ้น จนกระทั่งกลายมาเป็นองค์ประกอบที่สำคัญของนวตกรรมและเครื่องจักรรุ่นใหม่ๆในสังคมอุตสาหกรรมสมัยใหม่และเครื่องจักรอัตโนมัติในปัจจุบัน ดังตัวอย่างดังนี้ ตามนิยามของวิศวกรรมการคอนโทรลแบบอัตโนมัติ (Automatic Control)หรือระบบการคอนโทรลอัตโนมัติแบบป้อนกลับ(Feedback Control System)สามารถจำแนกระบบควบคุมแบบลูปปิด(Closed loop control) ได้เป็นสาขาต่างๆดังนี้
 ตัวอย่างการประยุกต์ใช้เซอร์มอเตอร์กับระบ Bottle Filling |
|
ระบบเซอร์โวคือถึงอะไร
ตามนิยามของวิศวกรรมการคอนโทรลแบบอัตโนมัติ (Automatic Control)หรือระบบการคอนโทรลอัตโนมัติแบบป้อนกลับ(Feedback Control System)สามารถจำแนกระบบควบคุมแบบลูปปิด(Closed loop control) ได้เป็นสาขาต่างๆดังนี้
|
ระบบควบคุมแบบลูปปิด (Closed loop control) |
||
|
ระบบไฟฟ้า |
ระบบไดนามิคส์(ระบบเซอร์โว) |
ระบบกระบวนการ(Process) |
| โวลท์เตจและกระแสเร็คกูเลเตอร์ ฟีคแบ็คแอมปลิไฟเออร์ |
ควบคุมความเร็ว (Speed Control) ควบคุมแรงบิด (Torque Control) ควบคุมตำแหน่ง (Position Control) ควบคุมอัตราเร่ง (Velocity Control) |
ควบคุมอุณหภูมิ(Temp. Control) ควบคุมแรงดัน(Pressure Control) ควบคุมการไหล(Flow Control) ควบคุมความหนาแน่น(density Control) |
***จากตารางสารมารถสรุปได้ว่าระบบเซอร์โว คือการควบคุมเครื่องจักรกลให้ทำงานตอบสนองด้านไดนามิคส์(Dynamic Response)เช่นความเร็ว อัตราเร่ง แรงบิด และตำแหน่ง ไห้ได้ดีที่สุด(Optimum Solution)และใช้เวลาน้อยที่สุด( Time Optimum)
โครงสร้างระบบควบคุมเซอร์โวเป็นอย่างไร
ลักษณะของระบบควบคุมเซอร์โวมอเตอร์จะเป็นระบบควบคุมแบบลูปปิด(Closed loop control) ซึ่งประกอบด้วย 3 โหมดการควบคุมคือ โหมดการควบคุมแรงบิด(Torque Control Mode) ซึ่งอยู่วงรอบหรือลูปในสุด โหมดการควบคุมอัตราเร่ง(Velocity Control Mode) และโหมดการควบคุมตำแหน่ง(Position Control Mode) ซึ่งอยู่ลูปด้านนอกสุด โดยมีองค์ประกอบที่สำคัญๆดังรูป
1) »» เซอร์โวมอเตอร์ (Servo Motor) (4.2)
2) »» ชุดควบคุมการขับเคลื่อนเซอร์โว
(Servo Drive,Servo Amplifier หรือบ้างก็เรียกว่า servo controller ) (4.4,4.5,4.6)
3) »» อุปกรณ์ป้อนกลับ (Feedback Device เช่น Speed encoder และ Position Sensor ) (4.3)
*** ในบทความนี้ผมจะขอกล่าวถึงเฉพาะส่วนของเซอร์โวมอเตอร์ก่อน ส่วนองค์ประกอบอื่นๆ ผมจะนำเสนอในโอกาสต่อไปหากเพื่อนสมาชิกให้ความสนใจ
เชอร์โวมอเตอร์คืออะไร และมีการแยกประเภทอย่างไร ?
ประเภทของเซอร์โวมอเตอร์โดยทั่วจะมีทั้งดีซีและเอซีเซอร์โว ในเครื่องจักรรุ่นเก่าๆเราจะพบว่า dc servo motor มีการใช้เครื่องจักรกลอุตสาหกรรมมากกว่า ac servo motor เนื่องจากช่วงที่ผ่านมาการควบคุมกระแสกระแสสูงๆนั้นจะต้องใช้ SCRs แต่ปัจจุบันทรานซิสเตอร์ได้พัฒนาขีดความสามารถให้ตัดต่อกระแสสูงและใช้งานที่ความถี่ได้สูงๆขึ้น จึงทำให้ระบบควบคุมทางเอซีและระบบเซอร์โวได้ถูกนำมาใช้งานมากขึ้น ซึ่งสามารถแยกประเภทของเซอร์โวได้ดังนี้

มอเตอร์ชนิดที่มีแปรงถ่าน ( Brush Type = mit Bursten)
เซอร์โวมอเตอร์ชนิดนี้ที่สเตเตอร์จะเป็นแม่เหล็กถาวร ส่วนโรเตอร์ยังใช้แปรงถ่านและคอมมิวเตอร์เรียงกระแสเข้าสู่ขดลวดอาร์เมเจอร์ เหมือนกับดีซีมอเตอร์ทั่วไป
เซอร์โวมอเตอร์ชนิดที่ไม่มีแปรงถ่าน ( Brushless Type =Ohne Bursten)
เซอร์โวมอเตอร์ในกลุ่มนี้ประกอบด้วยดีซีเซอร์โว (dc brushless servo ่โรเตอร์ทำด้วยแม่เหล็กถาวร)
เอซีเซอร์โว (AC Servo ) ซึ่งมีทั้งแบบซิงโครนัสเซอร์โว
อะซิงโครนัสเซอร์โว (การนำอินดัคชั่นมอเตอร์มาใช้ทำเป็นระบบขับเคลื่อนเซอร์โวมอเตอร์ )
และ สเต็ปปิง เซอร์โวมอเตอร์
เซอร์โวมอเตอร์มีโครงสร้างและหลักการทำงานเป็นอย่างไร
บทความนี้จะขอกล่าวถึงเฉพาะเอซีเซอร์โวมอเตอร์ หรือซิงโครนัสเซอร์โวมอเตอร์ก่อน เนื่องจากเป็นชนิดที่กำลังมีบทบาทสำคัญต่อภาคอุตสาหกรรม (ส่วนเซอร์โวมอเตอร์ชนิดอื่นๆจะกล่าวถึงในตอนต่อๆไป)
ข้อจำกัดอย่างหนึ่งของระบบควบคุมเซอร์โว ก็คือการใช้งานจะต้องเป็นแบบ closed loop เท่านั้น การใช้งานระบบควบคุมเซอร์โวไม่สามารถเลือกควบคุมเป็นแบบ open loop ได้เหมือนกันระบบขับเคลื่อนเอซี(ac drives) การตอบสนองของระบบเซอร์โว เช่น อัตราเร่ง แรงบิด และตำแหน่งที่ควบคุม จะไม่เป็นไปตามวัตถุประสงค์หากไม่มีสัญญาณป้อนกลับไปยังชุดขับเคลื่อนเซอร์โว
การควบคุมการทำงานในระบบนี้อุปกรณ์ป้อนกลับหรือเอ็นโค๊ดเตอร์(encoder) จะมีบทบาทความสำคัญอย่างยิ่งเสมือนกับเป็นของคู่กันชนิดที่เรียกว่าขาดซึ่งกันและกันไม่ได้ ในทางปฎิบัติจึงทำเซอร์โวมอเตอร์และเอ็นโค๊ดเตอร์ ถูกออกแบบและผลิตสร้างขึ้นมาคู่กันในลักษณะเป็นแพ็คเกจ(package) ซึ่งมี encoder ติดอยู่ที่ส่วนท้ายของมอเตอร์ ดังรูป
Gearheads = เกียร์สำหรับลดความเร็วรอบเพื่อเพิ่มแรงบิด
Shafts = เพลาของมอเตอร์
Flanges = หน้าแปลนสำหรับติดตั้งมอเตอร์
Feed back = อุปกร์ป้อนกลับหรือ encoder
Connectorization = ขั้วต่อสายไฟเข้ามอเตอร์ และขั้วต่อสายสำหรับ encoder
Breakes = ชุดเบรก
โครงสร้างของ AC servo Motor จะคล้ายกับมอเตอร์ 3 เฟสทั่ว ๆ ไป ซึ่งจะประกอบด้วย 2 ส่วนที่สำคัญ คือ สเตเตอร์และโรเตอร์ โดยสเตเตอร์จะประกอบด้วยขดลวด 3 ชุด ขดลวดภายในจะต่อเป็นแบบสตาร์ (Star หรือ WYE) และมีสายต่อมาที่ขั้วต่อสายด้านนอก 3 เส้น (จุดนิวทรอลจะอยู่ด้านใน) ส่วนโรเตอร์ทำด้วยแม่เหล็กถาวร(Permanent Magnet) ไม่มีขดลวดพัน,ไม่มีคอมมิวเตเตอร์ และไม่มีแปรงถ่าน (Brushless)
(****โครงสร้างที่ไม่มีขดลวดพันไม่และแปรงถ่าน จะทำให้ประสิทธิภาพของมอเตอร์สูงขึ้น ไม่มีการสูญเสืยในขดลวดทองแดง ไม่ต้องรบำรุงรักษาเนื่องจากแปรงถ่าน ไม่เกิดประกายไฟเนื่องจากการเรียงกระแสจากแปรงถ่านผ่านคอมมิวเตอร์ไปยังขดลวดทองแดงที่พันอยู่ในตัวโรเตอร์)
|
|
 |
|

การทำงานของเซอร์โวมอเตอร์ชนิดนี้จะคล้ายกับการทำงานของซิงโครนัสมอเตอร์3 เฟส กล่าวคือเมื่อมีการควบคุมให้คอนโทรลเลอร์จ่ายกระแสไฟฟ้าเข้าไปยังขดลวดที่สเตเตอร์ แกนเหล็กของสเตเตอร์จะกลายเป็นแม่เหล็กไฟฟ้า และหมุนเคลื่อนที่ด้วยความเร็วที่แปรผันตามความถี่ ซึ่งเรียกว่า"ความเร็วซิงโครนัส(synchronous speed)หรือความเร็วสนามแม่เหล็กหมุน " และจะดูดให้โรเตอร์ซึ่งเป็นแม่เหล็กถาวรหมุนเคลื่อนที่ตาม)
จากลักษณะโครงสร้างของโรเตอร์และหลักการทำงานที่เหมือนกับซิงโครนัสมอเตอร์ซึ่งเป็นมอเตอร์แบบเอซี แต่ไม่มีแปรงถ่าน(Brushless) ไม่มีซี่คอมมิวเตอรเตอร์ จึงทำให้มอเตอร์ชนิดนี้มีชื่อเรียกขานแตกต่างกันออกไป เช่น เรียกทับศัพท์ว่า " Permanent Magnet Synchronous Motor(PMSM) " ซึ่งหมายถึงซิงโครนัสมอเตอร์ที่ไม่มีแปรงถ่าน บ้างก็เรียกว่าเอซีเซอร์โวมอเตอร์( AC Servo motor) หรือบ้างก็เรียกสั้นๆย่อๆว่า AC Brushless หรือ Brushless Motor เป็นต้น
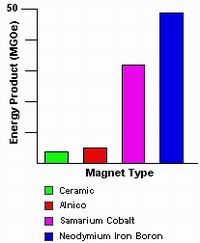
สำหรับวัสดุที่นำมาสร้างแม่เหล็กถาวรนี้จะแตกต่างกันไป โดยขึ้นอยู่กับราคาและเทคโนโลยีของบริษัทผู้ผลิดนั้นๆ ซึ่งมีตั้งแต่ชนิดทีราคาถูกเช่น เซรามิก(เฟอไรต์) จนถึงการใช้วัสดุที่มีราคาแพงอย่างเช่น ซามาเรียม โคบอลต์ หรือ นีโอไดเมียม เป็นต้น (ปัจจุบันเอซีเซอร์โวมอเตอร์ส่วนใหญ่จะใช้วัสดุสารแม่เหล็กแบบ นีโอไดเมียม เนื่องจากมีคุณสมบัติความเป็นแม่เหล็ก และความเหมาะสมเรื่องราคาดีกว่า เมื่อเปรียบเทียบกับวัสดุสารแม่เหล็กแบบอื่นๆ )
เซอร์โวมอเตอร์แตกต่างกับมอเตอร์ชนิดอื่นๆอย่างไร
นอกเหนือจากโครงสร้างที่พยายยามออกแบบให้โรเตอร์ทำด้วยแม่เหล็กถาวร ไม่มีขดลวดพัน ไม่ต้องใช้แปรงถ่านและคอมมิวเตอร์เพื่อลดอันที่จะเกิด จะทำให้ประสิทธิภาพของมอเตอร์สูงขึ้น ไม่มีการสูญเสืยในขดลวดทองแดง ไม่ต้องรบำรุงรักษาเนื่องจากแปรงถ่าน ไม่เกิดประกายไฟเนื่องจากการเรียงกระแสจากแปรงถ่านผ่านคอมมิวเตอร์ไปยังขดลวดทองแดงที่พันอยู่ในตัวโรเตอร์)การตอบสนองทางด้านไดนามิคส์ที่ดีกว่าคือความแตกต่างที่ชัดเจนของเซอร์โวมอเตอร์ ได้ถูกพัฒนาขึ้นมาเพื่อเติมเต็มความต้องการคุณสมบัติการตอบสนองด้านไดนามิคส์ โดยเฉพาะอย่างยิ่งกับงานที่ต้องมีการควบคุมตำแหน่ง (Position Control) ซึ่งเป็นระบบที่ต้องการความละเอียดและความแม่นยำของตัวขับเคลื่อนเป็นอย่างยิ่งในการควบคุมสูงเป็นพิเศษของ
ในทางปฏิบัติเพื่อให้ได้มาซึ่งคุณสมบัติดังกล่าว การวิจัยคิดค้นและกระบวนการผลิตจึงได้พยายามออกแบบให้โรเตอร์มีเส้นผ่าสูนย์กลางและรัศมีเล็กๆ รวมถึงการทำให้โรเตอร์เป็นแม่เหล็กถาวรเพื่อเป็นการลดแรงเฉื่อยองโรเตอร์(Rotor moment of inertia) และชดเชยแรงบิดหรือทอร์คที่หายไปเนื่องจากโรเตอร์มีขนาดเล็กลงด้วยการเพิ่มความยาวโรเตอร์ ดังนั้นรูปร่างโครงสร้างของเซอร์โวมอเตอร์ ที่เราพบเห็นทั่วไปจึงมีลักษณะผอมบางและมีความยาวมากกว่ามอเตอร์ที่ใช้งานทั่วไป นอกจากนั้นยังมีแรงบิดสูงกว่ามอเตอร์ทั่วไปอีกด้วย (หากพิจารณาที่พิกัดกำลังเท่าๆกัน) ซึ่งสามารถเปรียบเทียบได้คล้ายกับคนที่มีรูปร่าง " สูง ผอมบาง แต่แรงดี " เป็นต้น
คำอธิบาย Asynchronous Permanent Magnet Synchronous Servo ***** แรงเฉื่อยของโรเตอร์
เปรียบเทียบที่พิกัดกำลังเท่าๆกัน (Rated power)
0.75 kW
0.75 kW
ความเร็วพิกัด (Rated speed)
2825 min-1
3000 min-1
แรงบิดพิกัด (Rated torque)
2,5 Nm
2.4 Nm
แรงบิดสูงสุด (Max. torque)
6,6 Nm
12.0 Nm
(Rotor moment of inertia)5.7 x 10-4 kgm2
2.7 x 10-4 kgm2
เปรียบเทียบเวลาที่ใช้เร่งความเร็วไปที่ 3000 รอบต่อนาที (ตามทฤษฎี)
(Theor. acceleration time to 3000 min-1) 27 ms
7 ms
กระแสพิกัด (Rated current)
3.0 A
2.6 A
แรงดันพิกัด (Rated voltage)
230 V
190 V
ประสิทธิภาพ (Efficiency)
77 %
88 %
ตารางเปรียบเทียบคุณสมบัติทั่วๆไปของอินดัคชั่นมอเตอร์กับ( Asynchronous)
กับเซอร์โวมอเตอร์ P.M.Synchronous Servo motor
ตัวอย่าง ตารางคุณสมบัติทางเทคนิคของเซอร์โวมอเตอร์
กราฟแสดงคุณสมบัติด้านความเร็ว - แรงบิดของเซอร์โวมอเตอร์
จากกราฟแสดงคุณสมบัติจะเห็นว่าพื้นที่การใช้งานของเซอร์โวจะประกอบด้วย 2 ย่าน คือย่านใช้งานปกติแบบต่อเนื่อง(Permanent duty)และย่านใช้งานช่วงสั้นๆ (Short time duty) ส่วนกราฟก็จะประกอบด้วยแกนความเร็ว(X )และแกนทอร์ค(Y )
แกนความเร็ว(X )จะประกอบด้วย 3 จุดที่ต้องพิจารณาคือความเร็วขณะไม่มีโหลด(no ) ,ความเร็วใช้งานปกติตามพิกัด(Nominal Speed) และความเร็วที่จ่ายทอร์คสูงสุด(nMmax)
ส่วนแกนทอร์ค(Y )ก็จะประกอบด้วย3 จุดที่ต้องพิจารณาเช่นกันคือ ทอร์คที่ใช้งานปกติตามพิกัด(MN) ,ทอร์คในขณะที่หยุดนิ่งอยู่กับที่(Mdo) และทอร์คสูงสุด(Mmax) โดยแต่ละจุดมีความหมายดังนี้
|
อักษรย่อ |
คำอธิบาย |
หมายเหตุ |
|
| MN (Rated Torque | = | ทอร์ค/แรงบิดพิกัด | ย่านที่มอเตอร์สามารถขับโหลดหรือใช้งานต่อเนื่อง |
| Mdo Stall Torque |
= |
ทอร์คขณะหยุดนิ่ง |
ทอร์คที่เซอร์โวมอเตอร์สามารถจ่ายโหลดได้ในขณะที่หยุดนิ่งอยู่กับที่หรือความเร็วเป็น 0 รอบ |
| Mmax | = | ทอร์คสูงสุด | แรงบิดสูงสุดที่มอเตอร์สามารถสามารถขับโหลดได้ โดยทั่วไปเซอร์โวมอเตอร์สามารถจ่ายทอร์คสูงสุดได้ประมาณ 5 เท่าของทอร์คพิกัด ( Mmax = 5*MN ) |
| nMmax | = | ความเร็วขณะทอร์คสูงสุด | ความเร็วขณะที่จ่ายทอร์คสูงสุด |
| Nominal Speed | = | ความเร็วพิกัด | ความเร็วใช้งานปกติ |
| no | = | ความเร็วขณะไม่มีโหลด |